2.2.4. MVIINV¶
This program actually performs the 3D inversion of magnetic data to recover magnetic vectors. Command line usage is:
mviinv mviinv.inp [nThreads]
For a sample input file type:
mviinv -inp
The argument specifying the number of CPU threads used in the OpenMP format is optional. If this argument is not given to the program, chooses to use all of the CPU threads on the machine. This argument allows the user to specify half, for example, of the threads so that the program does not take all available RAM. Note that this option is not available in the MPI-based code used for clusters.
2.2.4.1. Input files¶
Input files can be any file name. If there are spaces in the path or file name, you MUST use quotes around the entire path (including the filename). Files that may be used by the inversion are:
obs.mag: Mandatory observations file.mviinv.mtx: Mandatory sensitivity matrix from MVISENinitial.fld: Optional initial vector model file. Vector files inmviinvcurrently need to be P,S,T mode.ref.den: Optional refence vector model file. Vector files inmviinvcurrently need to be P,S,T mode.active.txt: Optional ref:active model file <activeFile>upperBound.fld: Optional upper bound vector model file. Vector files inmviinvcurrently need to be P,S,T mode. Values can be used to set a global bound (see below).lowerBound.fld: Optional lower bound vector model file. Vector files inmviinvcurrently need to be P,S,T mode. Values can be used to set a global bound (see below).weights.wt: Optional weighting file. Weights can be given for each P,S,T component (i.e., there may be three weight files)mviinv.inp: The control file containing the options. Does not need to be specifically called “mviinv.inp”.
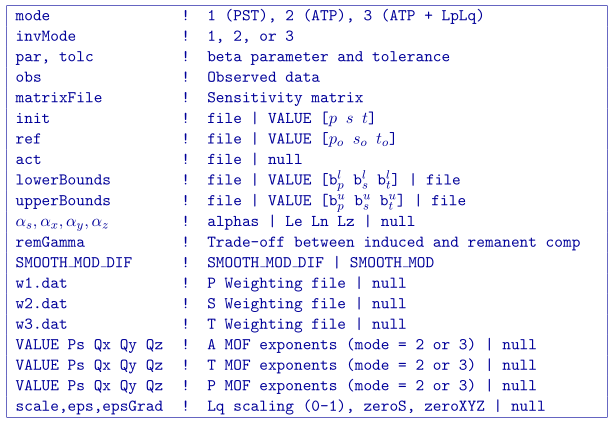
The parameters within the control file are:
mode: An integer specifying one of three choices on which solution the inversion will solve:mode=1: the program solves the vector problem in the P,S,T (Cartesian) space where P is the inducing field direction and S and T are its orthogonal components.mode=2: the program solves the vector problem in the A,T,P (Spherical) space where A is the amplitude (i.e., effective susceptibility), T is the theta angle, and P is the psi angle.mode=3: the program solves the vector problem in the A,T,P (Spherical) and then uses the last four lines of the input file to solve the Lp/Lq problem for compactness/blockiness.
invMode: An integer specifying one of three choices for determining the trade-off parameter.invMode=1: the program chooses the trade off parameter by carrying out a line search so that the target value of data misfit is achieved (e.g., \(\phi_d^*=N\)).invMode=2: the user inputs the trade-off parameter (par).invMode=3: The user gives the trade-off parameter (par) and the initial model from an A,T,P L2 inversion (mode=2) is used (and required) and the program will automatically go to the Lp/Lq solves. This mode only runs the A,T,P formulation for Lp/Lq.
par,tolcTwo real numbers that are dependent upon the value of mode.mode=1: the target misfit value is given by the product ofparand the number of data \(N\) , i.e.,par=1is equivalent to \(\phi_d^*=N\) andpar=0.5is equivalent to \(\phi_d^*=N/2\) . The second parameter,tolc, is the misfit tolerance in fractional percentage. The target misfit is considered to be achieved when the relative difference between the true and target misfits is less thantolc. Normally,par=1is ideal if the true standard deviation of error is assigned to each datum. Whentolc=0, the program assumes a default value oftolc=0.02since this number must be positive.invMode=2:paris the user-input value of trade off parameter. In this case,tolcis not used by the program.invMode=3:paris the user-input value of trade off parameter andtolcis the misfit tolerance in fractional percentage.
NOTE: When bothparandtolcare used. When onlyparis used. Whenmode=3, neither nortolcare used. However, the third line should always have two values.obs: Input data file. The file must specify the standard deviations of the error. By definition these values are greater than zero.matrixFile: The binary file of sensitivities created by MVISEN.init: The initial magnetization vector model in P,S,T mode. Values can be defined as a value for uniform models (e.g.VALUE 0.001 0.001 0.001), or by a filename. There must be three values (P,S,T) if this option is used. Each component must be within the upper and lower bounds.init: The reference magnetization vector model in P,S,T mode. Values can be defined as a value for uniform models (e.g.VALUE 0 0 0), or by a filename. There must be three values (P,S,T) if this option is used. Each component must be within the upper and lower bounds.act: The active model file defining which cells in the model are allowed to be solved.lowerBounds: The reference magnetization vector model in P,S,T mode. Values can be defined as a value for uniform models (e.g.VALUE -1 -1 -1), or by a filename. There must be three values (P,S,T) if this option is used. For example, a P value of -1 is a magnetization reverse to the inducing field with an amplitude of 1 SI.upperBounds: The reference magnetization vector model in P,S,T mode. Values can be defined as a value for uniform models (e.g.VALUE 1 1 1), or by a filename. There must be three values (P,S,T) if this option is used. For example, a P value of 1 is a magnetization in the inducing field direction with an amplitude of 1 SI.\(\alpha_s, \alpha_x, \alpha_y, \alpha_z\): Coefficients for the each model component. \(\alpha_s\) is the smallest model component. Coefficient for the derivative in the easting direction. \(\alpha_y\) is the coefficient for the derivative in the northing direction. The coefficient \(\alpha_z\) is for the derivative in the vertical direction.
If
nullis entered on this line, then the above four parameters take the following default values: \(\alpha_s = 0.0001, \alpha_x = \alpha_y = \alpha_z = 1\). All alphas must be positive and they cannot be all equal to zero at the same time.NOTE: The four coefficients in line 9 of the control file may be substituted for three corresponding length scales \(L_x, L_y\) and \(L_z\) and are in units of metres. To understand the meaning of the length scales, consider the ratios \(\alpha_x/\alpha_s\), \(\alpha_y/\alpha_s\) and \(\alpha_z/\alpha_s\). They generally define smoothness of the recovered model in each direction. Larger ratios result in smoother models, smaller ratios result in blockier models. The conversion from \(\alpha\)'s to length scales can be done by:
\[\label{eq:lengths} L_x = \sqrt{\frac{\alpha_x}{\alpha_s}} ; ~L_y = \sqrt{\frac{\alpha_y}{\alpha_s}} ; ~L_z = \sqrt{\frac{\alpha_z}{\alpha_s}}\]When user-defined, it is preferable to have length scales exceed the corresponding cell dimensions. Typically having length scales of four cell widths are a good starting point.
remGamma: This is a number that places (de-)emphasis on the remenant magnetization components (and extra scaling of S,T compents versus P). Ifnullis chosen, the trade-off between induced and remanent components are 0.5. The higher the number, the stronger the inversion will try to recover an induced model.SMOOTH_MOD: This option was not available in previous versions of the code and can be used to define the reference model in and out of the derivative terms. The options are:SMOOTH_MOD_DIF(reference model is defined in the derivative terms) andSMOOTH_MOD(reference model is defined in only the smallest term).w1.dat: Name of the weights file containing weighting matrices for the P component. Ifnullis entered, default values of unity are used.w2.dat: Name of the weights file containing weighting matrices for the S component. Ifnullis entered, default values of unity are used.w3.dat: Name of the weights file containing weighting matrices for the T component. Ifnullis entered, default values of unity are used.VALUE Ps Qx Qy Qz: The Lp/Lq exponents for the magnetization amplitude (A). The mode must be 2 or 3 and this line is not required if mode=1.nullmakes \(P=Q_x=Q_y=Q_z=2\). P works on the smallest model component and Qs are on the spatial components of the model objective function.VALUE Ps Qx Qy Qz: The Lp/Lq exponents for the theta angle (T: polar angle positive down). The Lp constant is ignored. The mode must be 2 or 3 and this line is not required if mode=1.nullmakes \(P=Q_x=Q_y=Q_z=2\). Qs are on the spatial components of the model objective function.VALUE Ps Qx Qy Qz: The Lp/Lq exponents for the phi angle (P: zenith angle). The Lp constant is ignored. The mode must be 2 or 3 and this line is not required if mode=1.nullmakes \(P=Q_x=Q_y=Q_z=2\). Qs are on the spatial components of the model objective function.scale,eps,epsGrad: The scaling between Lp and Lq components in range \([0,1]\).epsis an effective zero for the amplitude values.epsGradis an effective zero value for the change in amplitude spatially (i.e., derivatives). The program will calculate these zeros based on a single standard deviation of the L2 model ifnullis given with no extra scaling between Lp and Lq (scale = 0.5).NOTE: This line is only incorporated for the amplitude. The smallest model component is turned off for the Lp with the two angles, theta and phi. The gradient effective zero is set to two and five degrees for theta and phi, respectively.
2.2.4.1.1. Example of control file¶
Below is an example of a control file to run P,S,T mode (like VOXI):
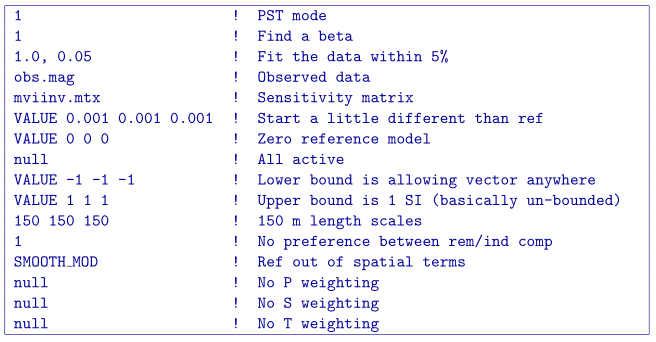
Below is another example of a control file. In this case trying to recover a sparse, but smoothly varying amplitude.
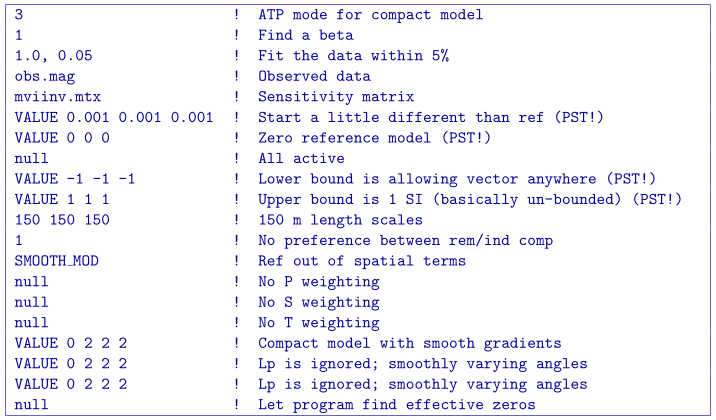
NOTE: Although one can run ATP (MVI-S) mode in smoothness only, it is designed to be a means-to-an-end for sparse and blocky models. The smooth result will be very similar to the PST (MVI-C) mode but run much slower due to its non-uniqueness and non-linearity.
2.2.4.2. Output files¶
Seven general output files are created by the inversion. They are:
mviinv.log: The log file containing the minimum information for each iteration and summary of the inversion.mviinv.out: The “developers” log file containing the details of each iteration including the model objective function values for each component, number of conjugate gradient iterations, etc.mviinv_xxx.amp: Amplitude of the recovered model (ie effective susceptibility) for the “xxx” iteration in an model file format (e.g., “mviinv_004.amp”).mviinv_xxx.rem: Remanent component of the recovered model for the “xxx” iteration in an model file formatmviinv_xxx.ind: Induced component of the recovered model for the “xxx” iteration in an model file formatmviinv_xxx.fld: Recovered magnetization vector for the “xxx” iteration in an model vector file formatmviinv_xxx.pre: Predicted data files (without uncertainties) output for the “xxx” iteration.